使用功能包组织cpp节点
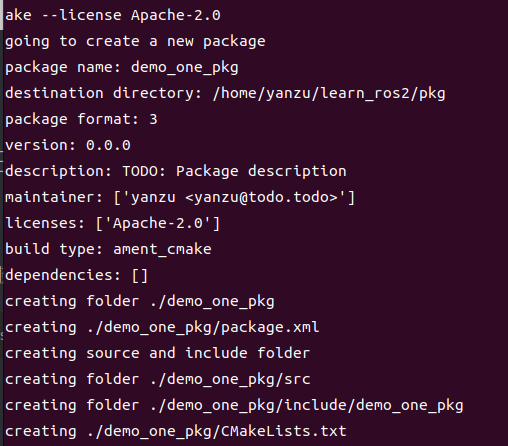
创建一个功能包,这里所在的目录是 ~/learn_ros2/chapter_2/
创建好之后显示以下信息,
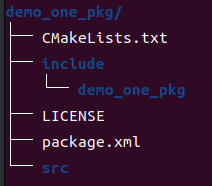
目录结构如下,include/demo_one_pkg 文件用于存放编写的头文件/库文件
创建好包之后,进入 demo_one_pkg/src/ 目录下,创建一个 .cpp 文件,这里叫 demo_one.cpp,内容如下,
2
3
4
5
6
7
8
9
10
11
12
13
14
15
int main(int argc, char **argv){
// 初始化参数
rclcpp::init(argc, argv);
// 创建节点
auto node = std::make_shared<rclcpp::Node>("demo_one_node");
// 打印日志
RCLCPP_INFO(node->get_logger(), "hello");
// 运行节点
rclcpp::spin(node);
// 关闭节点
rclcpp::shutdown();
return 0;
}返回上一级目录,即 demo_one_pkg/,编辑 CMakeLists.txt
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
project(demo_one_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
找到依赖
find_package(ament_cmake REQUIRED)
1.查找 rclcpp 的头文件和库文件
find_package(rclcpp REQUIRED)
uncomment the following section in order to fill in
further dependencies manually.
find_package(<dependency> REQUIRED)
2.添加可执行文件,(节点名,源文件地址)
add_executable(demo_one_node src/demo_one.cpp)
头文件包含
target_inlude_directories(demo_one_node PUBLIC ${rclcpp_INCLUDE_DIRS})
库文件链接
target_link_libraries(demo_one_node ${rclcpp_LIBRARIES})
上面两句用这一句代替,他是依赖于 find_package(ament_cmake REQUIRED) 的
ament_target_dependencies(demo_one_node rclcpp)
将 demo_one_node 拷贝到 install目录下
install(TARGETS demo_one_node # 这里执行后目录就已经是 install/demo_one_pkg/
拷贝到 install/pkg_name/lib/pkg_name/ 下
DESTINATION lib/${PROJECT_NAME} # 这里执行后最后目录就是 install/demo_one_pkg/lib/demo_one_pkg/
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
the following line skips the linter which checks for copyrights
comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
the following line skips cpplint (only works in a git repo)
comment the line when this package is in a git repo and when
a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()在与 CMakeLists.txt 同级目录下还有一个 package.xml 文件,在该文件中也要对引用的头文件进行声明
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
<package format="3">
<name>demo_one_pkg</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="yanzu@todo.todo">yanzu</maintainer>
<license>Apache-2.0</license>
<!-- 在这里添加头文件的声明 -->
<depend>rclcpp</depend>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>然后就可以对包进行编译了,编译时必须要在包的上一路径打开终端进行编译
在正式编译之前,可以在包目录下创建一个 build 文件先测试一下编译能否通过,创建这个build的目的是为了存放编译生成的文件
2
3
4
cd build/
cmake ../
make因为 CMakeLists.txt 在上一级目录中,要使其转换为 makefile ,所以是 cmake ../
这里在 demo_one_pkg 的上一路径下进行编译,也即 chapter_2/ 路径下进行编译
2
colcon build编译成功后,显示如下信息
此时,chapter_2/ 路径下分别有这些文件,build、install、log、demo_one_pkg
生成的可执行文件 demo_one_node 在 build/pkg_name/ 下,在该路径下,执行以下命令,可以查看当前节点依赖了哪些库,是否链接上
正式运行节点之前要添加环境变量,可以使用以下命令查看当前包的环境变量是否配置了,未配置直接运行节点会显示找不到当前的包(以下命令都是在 chapter_2/ 路径下执行)
使用以下命令进行环境变量配置
再使用上面查看环境变量的命令看看是否配置成功,最后运行节点(ros2 run pkg_name node_name)