ROS2 的安装
鱼香ROS安装命令
安装成功后可使用以下命令查看
$ ros2
测试安装是否成功,运行小海龟
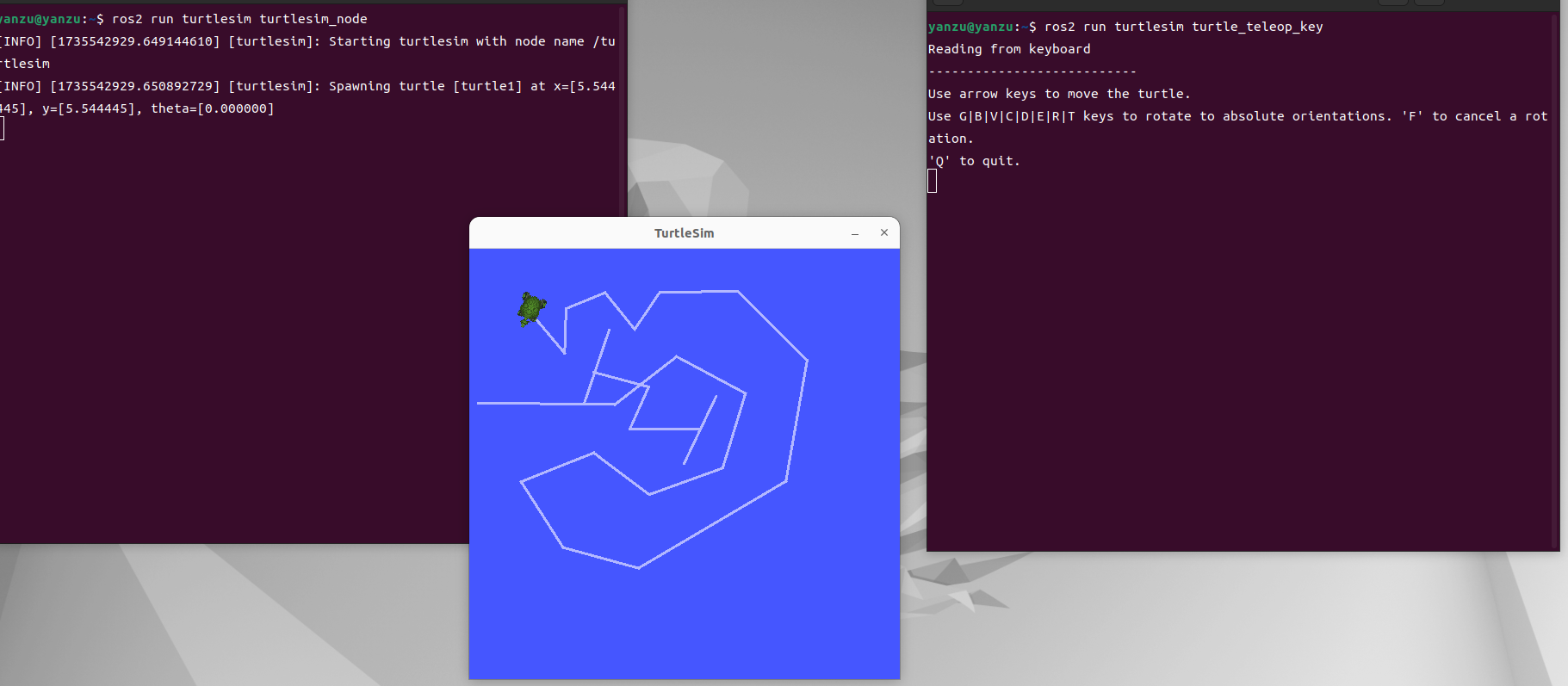
先运行一个小海龟节点
$ ros2 run turtlesim turtlesim_node
新建一个命令框运行另外一个节点,与前一个节点通信,从而通过键盘来控制小海龟移动
$ ros2 run turtlesim turtle_teleop_key
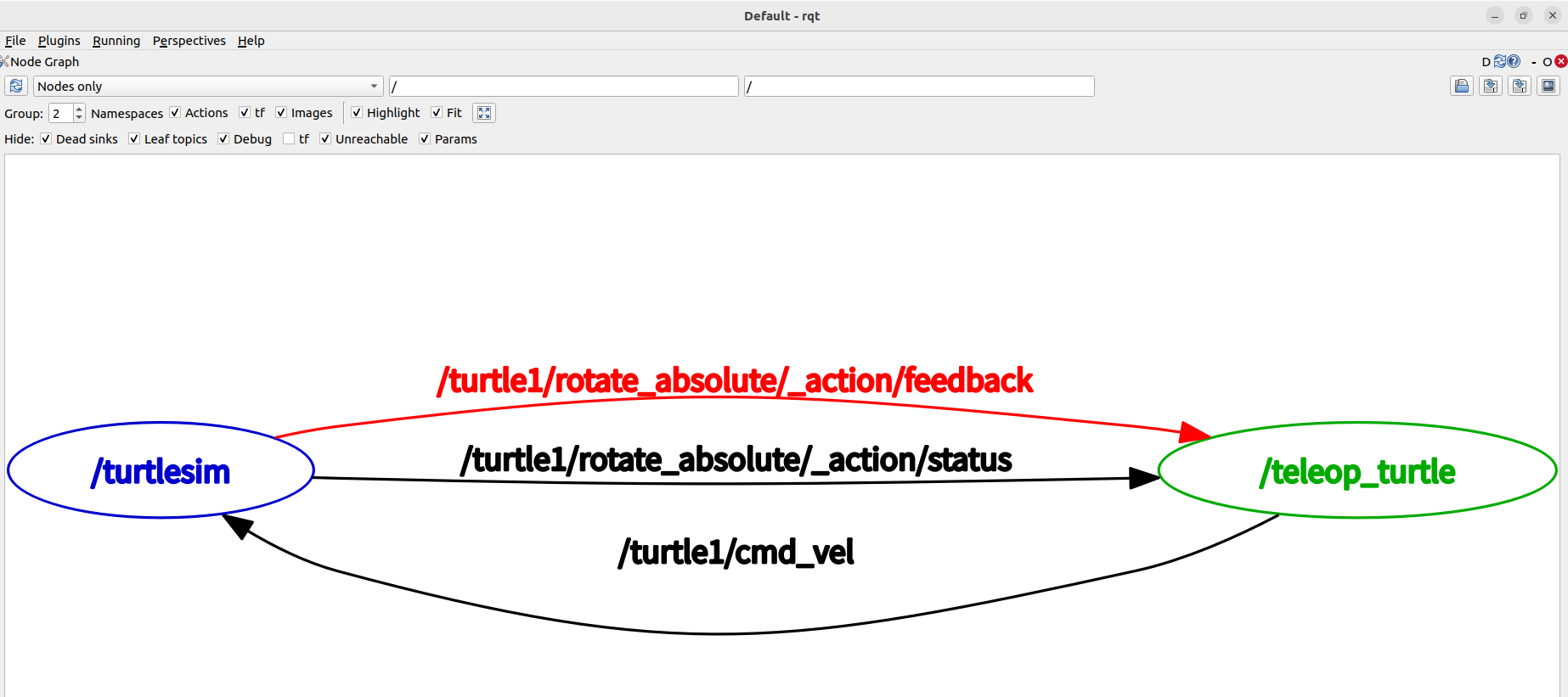
此时可以再新建一个命令框,执行
$ rqt
点击 plugins -> introspection -> node graph,就可以看到当前两个节点之间的通信情况了
teleop_turtle 通过 /turtle1/cmd_vel 对 turtlesim 进行控制
ros2 run turtlesim turtlesim_node 这条命令是什么意思,又是如何执行的?
首先, ros2 run 会找到一个环境变量 AMENT_PREFIX_PATH,可能有多个值,多值就循环遍历
接着,在这个环境变量对应的路径下去找 lib 文件,找到后再在其目录下找 turtlesim 包
找到对应的包之后,在其目录下找到可执行文件 turtlesim_node,然后执行
那么可以直接使用以下命令代替执行对应的可执行文件
(但只能是 AMENT_PREFIX_PATH=/opt/ros/humble 的情况下才能这么执行)
$ $AMENT_PREFIX_PATH/lib/turtlesim/turtlesim_node
修改环境变量, export 环境变量名=path
export AMENT_PREFIX_PATH=/opt/ros
在 linux 中,以 点(如 .a.txt) 开头的文件或文件夹是隐藏文件
查看当前目录下的所有文件,包括隐藏文件
$ ls -a
只要一打开终端,就会默认启动一个脚本 .bashrc,他会设置一系列的环境变量
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 yanzu_blog!